在計(jì)算機(jī)網(wǎng)絡(luò)工程領(lǐng)域,仿真技術(shù)是驗(yàn)證系統(tǒng)設(shè)計(jì)、分析網(wǎng)絡(luò)性能、確保通信可靠性的關(guān)鍵工具。Canoe(CAN Open Environment)作為一款廣泛應(yīng)用于汽車電子和工業(yè)通信領(lǐng)域的專業(yè)仿真與測(cè)試軟件,其仿真工程在總線系統(tǒng)開發(fā)中扮演著至關(guān)重要的角色。本文重點(diǎn)介紹Canoe的第3個(gè)仿真工程,聚焦于其總線仿真的核心功能與網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)。
一、 總線仿真功能詳解
Canoe的第3個(gè)仿真工程通常圍繞特定總線(如CAN、LIN、FlexRay、Ethernet等)的深度仿真與測(cè)試展開。其主要功能模塊包括:
- 網(wǎng)絡(luò)節(jié)點(diǎn)仿真:可以模擬網(wǎng)絡(luò)中的多個(gè)電子控制單元(ECU),包括它們的行為邏輯、通信協(xié)議棧(如CANoe自帶的CAPL腳本實(shí)現(xiàn))以及交互流程。用戶可以定義節(jié)點(diǎn)發(fā)送和接收的報(bào)文(Message)內(nèi)容、周期、觸發(fā)條件等,以構(gòu)建復(fù)雜的通信場(chǎng)景。
- 總線通信仿真與監(jiān)控:該工程能夠模擬總線的物理層與數(shù)據(jù)鏈路層行為,實(shí)時(shí)仿真總線上的信號(hào)傳輸、仲裁、錯(cuò)誤幀等。其強(qiáng)大的跟蹤窗口(Trace Window)可以高亮顯示所有網(wǎng)絡(luò)活動(dòng),包括報(bào)文、信號(hào)值、錯(cuò)誤和事件,便于工程師進(jìn)行實(shí)時(shí)監(jiān)控和離線分析。
- 信號(hào)與系統(tǒng)變量交互:支持對(duì)報(bào)文中的信號(hào)(Signal)進(jìn)行可視化操作和邏輯關(guān)聯(lián)。用戶可以通過(guò)面板設(shè)計(jì)器(Panel Designer)創(chuàng)建圖形化控制面板,動(dòng)態(tài)修改信號(hào)值,并觀察網(wǎng)絡(luò)中其他節(jié)點(diǎn)的響應(yīng),實(shí)現(xiàn)人機(jī)交互式仿真。
- 自動(dòng)化測(cè)試與評(píng)估:集成測(cè)試功能單元(Test Feature Set),支持編寫和運(yùn)行自動(dòng)化測(cè)試序列(Test Sequences),對(duì)網(wǎng)絡(luò)通信的時(shí)序、容錯(cuò)、一致性等進(jìn)行自動(dòng)化驗(yàn)證,并生成詳細(xì)的測(cè)試報(bào)告,評(píng)估系統(tǒng)是否符合設(shè)計(jì)規(guī)范。
- 診斷與協(xié)議仿真:可集成診斷功能(如UDS on CAN),仿真診斷儀與ECU之間的診斷通信,用于測(cè)試和驗(yàn)證車輛診斷服務(wù)。
二、 網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)配置
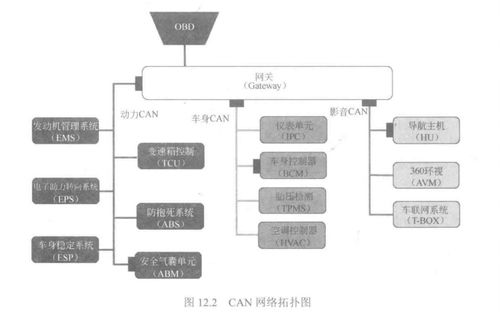
在Canoe的第3個(gè)仿真工程中,網(wǎng)絡(luò)拓?fù)涞亩x是仿真的基礎(chǔ)。它描述了網(wǎng)絡(luò)中各個(gè)節(jié)點(diǎn)(ECU仿真節(jié)點(diǎn)、真實(shí)ECU接口、網(wǎng)關(guān)等)以及總線通道之間的連接關(guān)系。配置過(guò)程主要包括:
- 拓?fù)鋱D構(gòu)建:在Canoe的仿真設(shè)置界面,用戶可以通過(guò)圖形化方式拖拽組件來(lái)構(gòu)建網(wǎng)絡(luò)拓?fù)洹R粋€(gè)典型的拓?fù)淇赡馨?/li>
- 多個(gè)仿真ECU節(jié)點(diǎn)(Simulated ECUs),由CAPL程序或系統(tǒng)變量控制其行為。
- 網(wǎng)絡(luò)接口硬件(如VN1600系列接口卡),用于連接真實(shí)的ECU或網(wǎng)絡(luò)段,實(shí)現(xiàn)“硬件在環(huán)”(HIL)仿真。
- 網(wǎng)關(guān)節(jié)點(diǎn)(Gateway),模擬在不同總線類型(如CAN和LIN)之間進(jìn)行報(bào)文路由與轉(zhuǎn)換的設(shè)備。
- 總線通道(Channel),代表不同類型的物理網(wǎng)絡(luò)(如CAN High, CAN Low)。
- 通道與節(jié)點(diǎn)關(guān)聯(lián):將每個(gè)仿真節(jié)點(diǎn)或硬件接口精確地分配到指定的總線通道上。例如,發(fā)動(dòng)機(jī)ECU仿真節(jié)點(diǎn)和變速箱ECU仿真節(jié)點(diǎn)可能被分配到同一個(gè)高速CAN通道上,而車身控制模塊則可能被分配到一個(gè)低速CAN或LIN通道上。
- 數(shù)據(jù)庫(kù)集成:網(wǎng)絡(luò)通信的“語(yǔ)言”由數(shù)據(jù)庫(kù)文件(如DBC文件用于CAN,LDF用于LIN)定義。在工程中必須導(dǎo)入或關(guān)聯(lián)相應(yīng)的數(shù)據(jù)庫(kù),以便Canoe能夠正確解析和生成報(bào)文與信號(hào),確保仿真的語(yǔ)義準(zhǔn)確性。
- 系統(tǒng)變量與網(wǎng)絡(luò)綁定:定義全局或局部的系統(tǒng)變量,并將其與網(wǎng)絡(luò)信號(hào)或節(jié)點(diǎn)狀態(tài)綁定,實(shí)現(xiàn)跨節(jié)點(diǎn)的數(shù)據(jù)共享與同步控制。
Canoe的第3個(gè)仿真工程是計(jì)算機(jī)網(wǎng)絡(luò)工程實(shí)踐中一個(gè)功能強(qiáng)大的虛擬實(shí)驗(yàn)室。它通過(guò)高度可配置的總線仿真功能和靈活的網(wǎng)絡(luò)拓?fù)浣#构こ處熌軌蛟诋a(chǎn)品開發(fā)早期就對(duì)復(fù)雜的車載網(wǎng)絡(luò)或工業(yè)通信系統(tǒng)的功能、性能及可靠性進(jìn)行全面的驗(yàn)證與測(cè)試,極大地縮短了開發(fā)周期,降低了實(shí)物測(cè)試的成本與風(fēng)險(xiǎn)。掌握其核心功能與拓?fù)渑渲茫沁M(jìn)行高效、可靠網(wǎng)絡(luò)系統(tǒng)設(shè)計(jì)與測(cè)試的關(guān)鍵技能。